歡迎訪問中實洛陽機械工程科技有限公司官網(wǎng),!



-
走進中實中實洛陽機械工程科技有限公司(原中實洛陽工程塑料有限公司)于2017年11月01日更名成立,,注冊資金5000萬元。專門從事摩擦襯墊的研制、開發(fā)和生產(chǎn),,以及礦山設(shè)備,、配件的生產(chǎn)。

-
產(chǎn)品中心提升機配件:摩擦襯墊,、天輪導(dǎo)向輪襯墊,、猴車襯墊、天輪襯墊,、滾筒襯板,、過渡塊、無石棉閘瓦,、壓塊,、固定塊、超高分聚乙烯板,、電纜掛鉤,、導(dǎo)繩板、滾筒襯塊等,。
品中心")
-
技術(shù)實力是中國礦業(yè)大學(xué)礦山機械摩擦材料科研基地,、教學(xué)實習(xí)基地,是河南科技大學(xué)產(chǎn)學(xué)研基地,,是中國重型機械工業(yè)協(xié)會會員單位,,是摩擦襯墊、塑料襯板等五項產(chǎn)品行業(yè)標(biāo)準(zhǔn)制定者,。
實力")


提升機盤式制動器閘間隙的監(jiān)測方法分析
發(fā)布時間:
2023-12-04
來源:
礦山機械雜志
國家《煤炭安全規(guī)程》第 423 條規(guī)定:當(dāng)閘瓦間隙超過規(guī)定值時,,須報警并閉鎖下次開車,。第426 條規(guī)定:盤形閘的閘瓦與閘盤之間的間隙不得超過 2 mm,。因此,,閘間隙直接影響盤式制動器的制動性能,正確測量并實時監(jiān)測閘間隙對盤式制動器具有重要意義,。
對于閘盤偏擺的限定:卷筒直徑小于 4 m 時,,閘盤偏擺不能超過 0.5 mm;大于 4 m 時,,閘盤偏擺不能超過 0.7 mm,,且閘盤因加工精度存在一定的誤差,故閘盤的偏擺,、閘瓦的磨損等都會直接影響閘間隙,。按照《煤炭安全規(guī)程》的規(guī)定,閘間隙應(yīng)考慮卷筒的偏擺,、閘盤的偏擺和閘瓦的磨損,,即閘間隙應(yīng)是卷筒和閘盤旋轉(zhuǎn) 1 周并考慮閘瓦磨損的情況下閘瓦與閘盤之間的間隙的最大值,同時當(dāng)閘間隙超過規(guī)定值時須報警并鎖閉下次開車,。目前,,測量閘間隙有多種方法,不同方法各有優(yōu)缺點,,現(xiàn)依次分析常見測量閘間隙的方法,,以及所測量的閘間隙是否符合《煤炭安全規(guī)程》,。

1 以制動器襯板為基準(zhǔn)測量閘間隙
以制動器襯板為基準(zhǔn)測量閘間隙是在提升機運轉(zhuǎn)和制動狀態(tài)下,,使用電渦流傳感器測量襯板的移動距離間接測量閘間隙。電渦流傳感器安裝在制動殼體上,,以制動器襯板為測量基準(zhǔn),,傳感器探頭對準(zhǔn)制動器閘瓦襯板,通過記錄敞,、閉閘過程襯板移動距離來實現(xiàn)閘瓦組件行程的監(jiān)測,,從而通過測量閘瓦組件行程測量閘間隙,如圖1所示,。測量閘間隙時,,首先保持制動器閉閘,記錄閘瓦背面與傳感器感應(yīng)面的距離X1,然后進行敞閘,,記錄閘瓦背面與傳感器感應(yīng)面的距離 X2,,則此次制動的閘間隙 δ = X1 - X2。
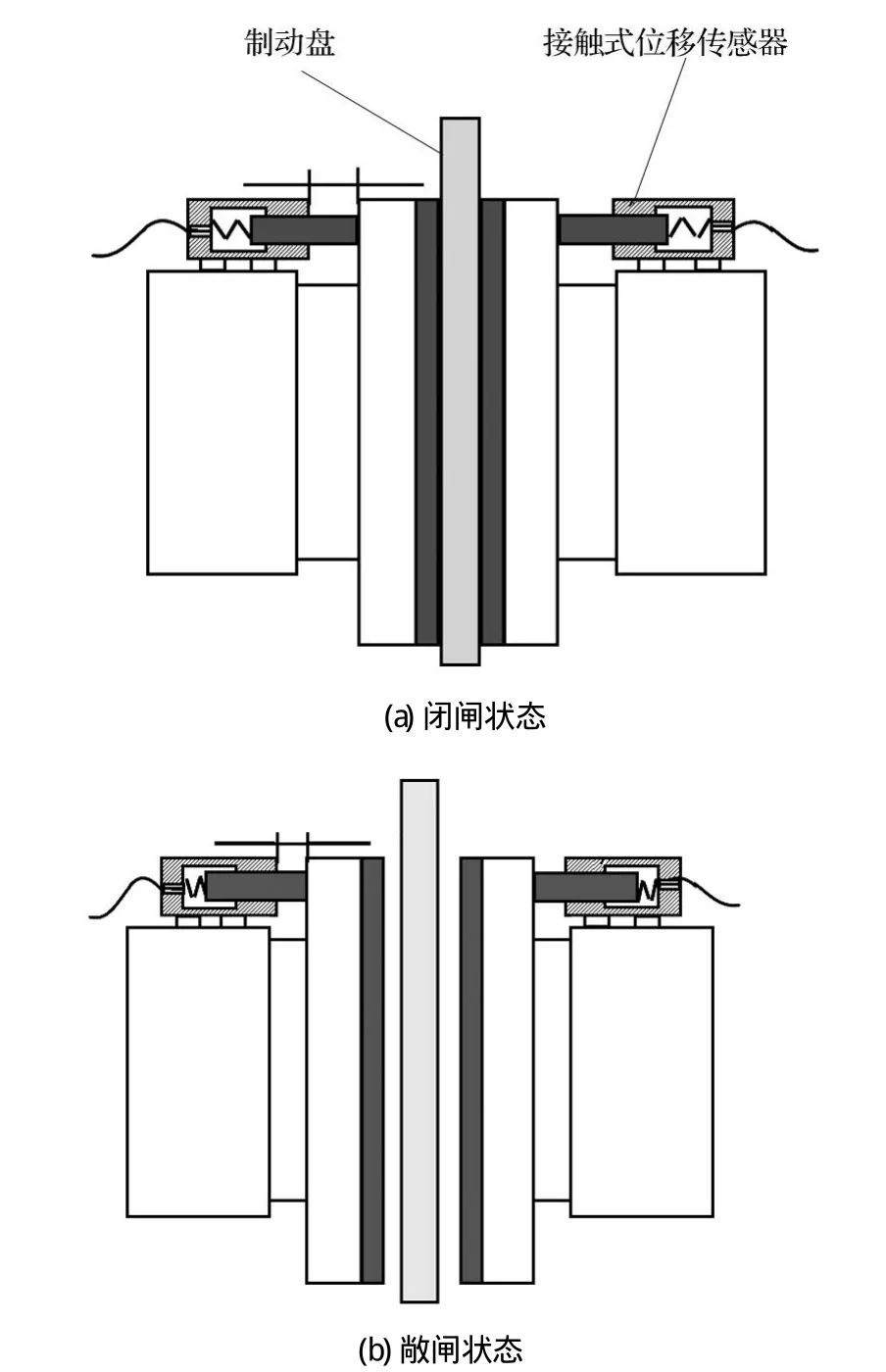
圖1 以制動器襯板為測量基準(zhǔn)
以制動器襯板為基準(zhǔn)測量閘間隙是靜態(tài)測量,,所測閘間隙是在提升機運轉(zhuǎn)和制動狀態(tài)下襯板移動的距離,,此移動距離僅是此次提升機停車位置時襯板的行程,表示此停車位置的閘瓦和閘盤的距離,,考慮到閘盤和卷筒存在一定的偏擺,,停車位置點測量的閘瓦和閘盤的距離不一定是提升機運行過程中閘瓦和閘盤之間距離的最大值,所以襯板行程不能時時監(jiān)測閘間隙的變化量,,從而全面反映閘間隙,。
2 以制動器支架為基準(zhǔn)測量閘間隙
以制動器支架為基準(zhǔn)測量閘間隙是在提升機運動狀態(tài)下以制動器支架為測量基準(zhǔn),使用電渦流傳感器測量閘間隙,。傳感器通過支架固定于制動器襯板上,,以制動器支架為測量基準(zhǔn),傳感器探頭對準(zhǔn)制動器支架,,通過記錄敞,、閉閘過程傳感器移動距離來實現(xiàn)閘瓦組件行程的監(jiān)測,從而通過測量閘瓦組件行程間接測量閘間隙,,如圖2所示,。測量閘間隙時,首先保持制動器敞閘,,記錄制動器支架與傳感器感應(yīng)面的距離X1,,然后進行閉閘,記錄制動器支架與傳感器感應(yīng)面的距離 X2,,則此次制動的閘間隙 δ = X1 - X2,。
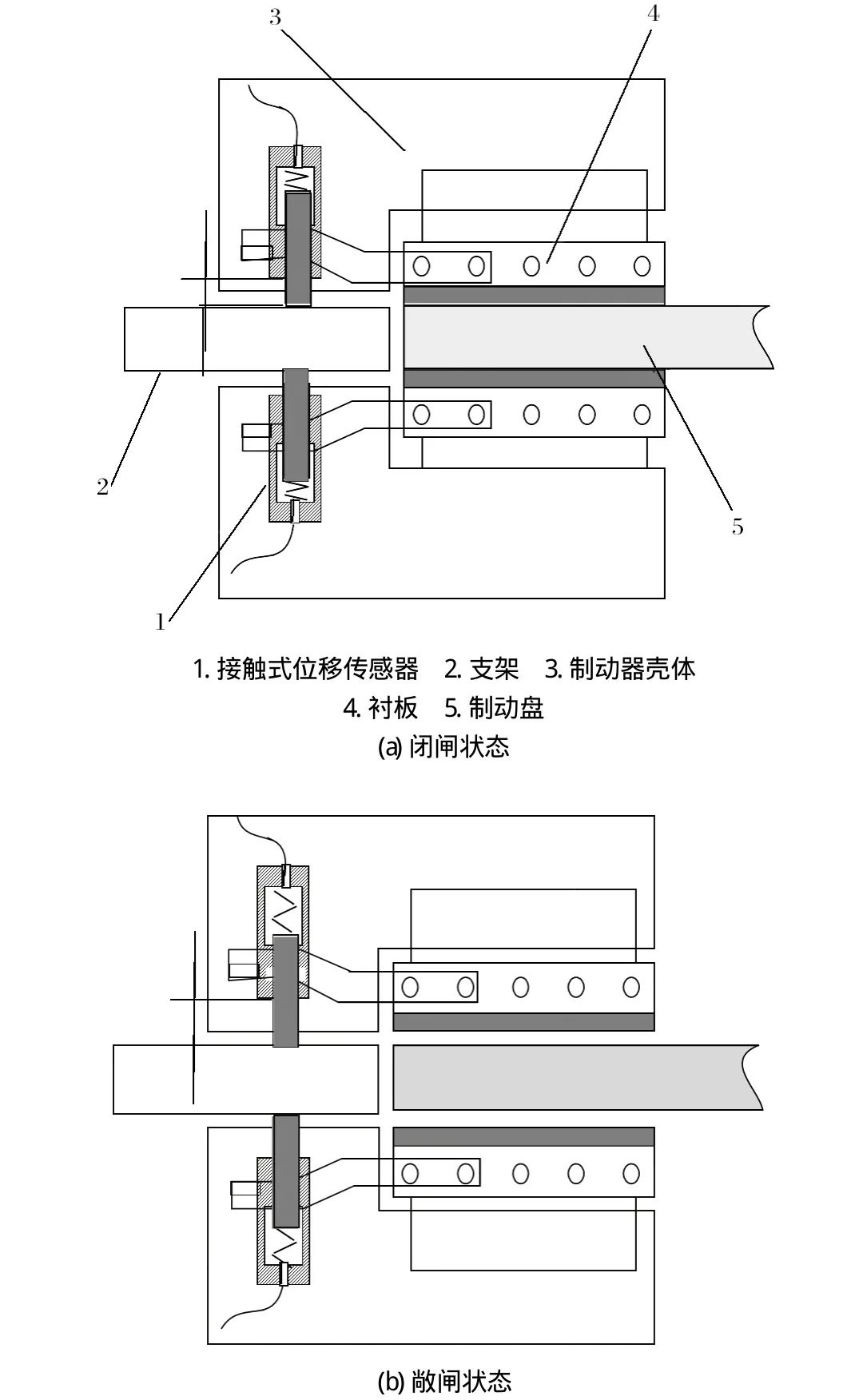
圖2 以制動器支架為測量基準(zhǔn)
以制動器支架為基準(zhǔn)測量閘間隙是靜態(tài)測量,所測閘間隙是在提升機運轉(zhuǎn)狀態(tài)和制動狀態(tài)下傳感器相對支架的移動距離,,與以制動器襯板為基準(zhǔn)測量閘間隙類似,,同樣是以傳感器的間接移動距離表示閘瓦和閘盤的間距,只是由于支架固定不動且面積較大,,傳感器相對支架的移動距離比襯板移動距離的精度和準(zhǔn)確度更高,,但同樣此傳感器相對支架的移動距離仍僅是此次提升機停車位置時傳感器的移動距離,未考慮閘盤和卷筒存在的偏擺,,不能時時監(jiān)測閘間隙的變化量,。
3 滑動式探針測量閘間隙
滑動式探針測量閘間隙是在提升機運轉(zhuǎn)和制動狀態(tài)下,使用滑動式探針測量探針移動距離來間接測量閘間隙,。探針支座固定在閘瓦上,,以探針支座為測量基準(zhǔn),,探針抵在閘盤上,記錄敞,、閉閘過程探針軸向移動引起探針電阻的變化量,,通過轉(zhuǎn)化電路將電阻阻值轉(zhuǎn)化為探針軸向距離,從而間接測量閘間隙,。測量閘間隙時,,首先保持制動器敞閘,探針抵在閘盤上,,記錄此時探針電阻阻值Ω1,,然后進行閉閘,探針同樣抵在閘盤上,,記錄此時探針電阻阻值Ω2,,通過轉(zhuǎn)化電路設(shè)置阻值和距離轉(zhuǎn)換系數(shù) k,則此次制動的閘間隙 δ = k (Ω1-Ω2),。
滑動式探針測量閘間隙為動態(tài)測量,,所測閘間隙是在提升機運轉(zhuǎn)狀態(tài)和制動狀態(tài)下使用滑動式探針測量探針移動距離來測量閘瓦和閘盤的距離,與以制動器襯板為基準(zhǔn)和以制動器支架為基準(zhǔn)不同,,探針抵在閘盤上,,可以將閘盤和卷筒的偏擺引入閘間隙的測量,探針的軸向移動距離可以表示閘瓦和閘盤的距離,。但是,,滑動式探針?biāo)鶞y量閘間隙僅表示此停車位置點的閘瓦和閘盤的距離,也不能時時監(jiān)測閘間隙的變化量,。
4 以閘盤為基準(zhǔn)測量閘間隙
以閘盤為基準(zhǔn)測量閘間隙是在提升機運轉(zhuǎn)狀態(tài)下,,以閘盤為測量基準(zhǔn)使用電渦流傳感器測量閘間隙。傳感器通過支架固定于制動器襯板上,,以閘盤為測量基準(zhǔn),,傳感器探頭直接對準(zhǔn)閘盤,傳感器跟隨襯板移動,,從而在敞閘過程中,,傳感器直接監(jiān)測閘瓦與閘盤間的距離,如圖3所示,。測量閘間隙時,,保持制動器敞閘,,同時保持閘盤運轉(zhuǎn),,記錄閘盤轉(zhuǎn)動 1 周過程中閘瓦與閘盤各點間距離的最大值,此最大間距即為閘間隙,。
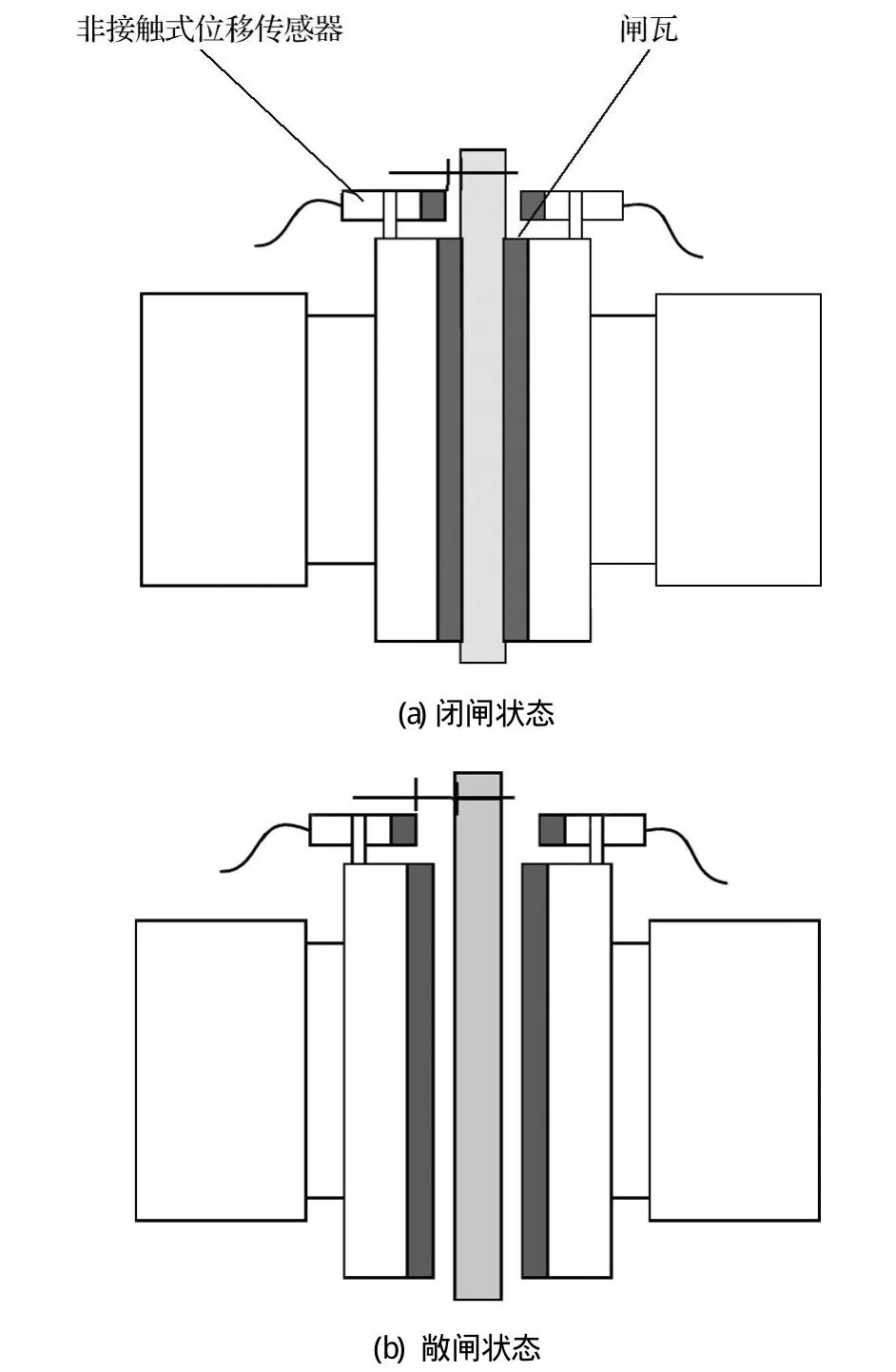
圖3 以閘盤為測量基準(zhǔn)
以閘盤為基準(zhǔn)測量閘間隙是動態(tài)測量,,所測閘間隙是通過傳感器直接測量閘瓦和閘盤的間距,,由于以閘盤為測量基準(zhǔn),將閘盤和卷筒的偏擺考慮到閘間隙的測量中,,并在提升機運轉(zhuǎn)過程中通過傳感器時時監(jiān)測閘瓦和閘盤的距離,,記錄閘瓦和閘盤之間距離的最大值,即閘盤和閘瓦之間的最大閘間隙,。當(dāng)閘瓦和閘盤的距離最大值即閘間隙超過規(guī)定值時,,可以及時報警并鎖閉下次開車。因此以閘盤為基準(zhǔn)測量閘間隙能時時全面反映閘盤和閘瓦之間的最大閘間隙值,。
5 塞規(guī),、百分表測量閘間隙
塞規(guī)、百分表測量閘間隙是在提升機制動狀態(tài)下,,使用塞尺和百分表等測量工具直接測量閘間隙,。在提升機停止運行時,調(diào)整卷筒兩側(cè)鋼絲繩的張力,,保證敞閘后卷筒靜止不動,,此時使用塞尺直接測量閘間隙,或?qū)俜直碇ё潭ㄔ诔ㄩ_閘的閘瓦上,,表針抵在閘盤上,,此時抱閘百分表顯示的變化數(shù)值就是閘間隙。
在提升機制動狀態(tài)下,,采用塞規(guī),、百分表直接測量此制動位置制動器閘瓦和閘盤的距離,一般用于人工校正閘盤和閘瓦間隙以及檢驗測量閘間隙方法所測的閘間隙在靜態(tài)是否準(zhǔn)確,。該方法為靜態(tài)測量,,沒有考慮閘盤偏擺,不能時時監(jiān)測閘間隙,。
6 結(jié)語
閘間隙是提升機制動器最關(guān)鍵的參數(shù),,正確監(jiān)測閘間隙對保障礦井提升機的安全運行至關(guān)重要。以上分析了幾種閘間隙的檢測方式,,以閘盤為測量基準(zhǔn)測量閘間隙,,能將閘盤和卷筒的偏擺考慮在內(nèi)并能實時監(jiān)測是一種全面反映閘間隙的檢測方式。
產(chǎn)品推薦
頁面版權(quán)所有 中實洛陽機械工程科技有限公司 本網(wǎng)站已支持 IPV4 IPV6雙向訪問 SEO標(biāo)簽 營業(yè)執(zhí)照 云資訊